Justin Sapun, justin.sapun.th@dartmouth.edu
Vibhuv Reddy, vibhuv.p.reddy.th@dartmouth.edu
Anna Pahl, anna.e.pahl.24@dartmouth.edu
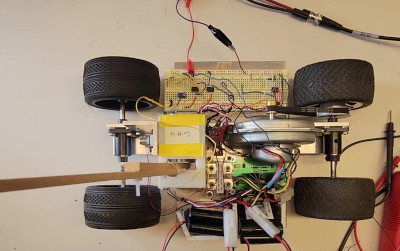
The overall objective of this project was to balance an inverted pendulum (stick) with a control system onboard an electric car. The main focus of this project is the control system developed, implemented, and tested. The electric car was built using a basic DC motor, Li-ion batteries, and a belt drive. The control system required us to utilize a position sensor for the stick as feedback, an error detector, and a compensator that would send the amplified error signal to the car drivetrain. In our design, we set system specifications that would ultimately lead us to construct a PID controller.
Implementation
We initiated the project by crafting a comprehensive system model and drawing a closed-loop block diagram encompassing various transfer functions. Opting for a PID compensator, our goal was to minimize peak overshoot in the system response. Subsequently, we characterized the sensor, motor/car, and the force-to-angle relationship. Leveraging Matlab’s SISOTOOL in the control system designer, we determined fundamental controller parameters in line with our specifications. The ensuing step involved constructing the controller transfer function, which could be used to calculate resistor and capacitor values for hardware implementation. Testing, analysis, and tuning ensued until the control system achieved the desired operational efficiency. The complete report is accessible below.
In the video demonstration, the car is already operational and stabilizing the stick. Once the stick receives an external force, the car reacts quickly, showcasing how responsive the PID controller can be as it reduces the error, eliminates steady-state error, and minimizes oscillations. In the video, we can see the car overshoot slightly, so changes can be made to tune the derivative component of the PID controller, which anticipates future system responses by considering the rate of change of the error signal. Towards the end of the video, we can see the car trying to return to its original position.
Skills
While designing and building an inverted pendulum car with a PID controller, I gained expertise in dynamic modeling, sensor integration, and PID tuning. The experience honed my skills in system controller design, hardware integration, and time/frequency domain system response analysis. Furthermore, troubleshooting and fine-tuning the PID component parameters provided practical insights into system optimization, contributing to a skill set in autonomous systems and control engineering.